
国内研究组开发出了将多个物体装入手掌后,从手掌中一个一个拿出来,可以放在自己想要的位置的创新机器人。有望将其投入于物流工厂,大幅提高生产率。
首尔大学机械工学系教授赵圭镇(音)及其研究团队开发出了可以一次性移动和排列多个物体的创新性“多物体抓握器(MOGrip)”,并于11日(当地时间)在国际学术杂志《科学•机器人学》上发表。抓握器是指可以抓住东西的机械手。论文第一作者是首尔大学在读博士生严在民。迄今为止开发的大多数抓握器都是以一个一个抓住物体并移动的方式作业的。虽然有不分顺序一次性扫过多个物体或在抓握器末端安装多个小抓手的方式,但无法按顺序重新排列物体。另外,如果不排列成一定的形状,就存在无法抓住物体的局限性。
研究组着眼于人移动多个物体的方式,开发了抓握器。人可以一次抓住各种物体,放在手掌上,然后转移到自己想要的位置。这时需要用手指夹住物体,转移到手掌上,再用手指夹住手掌上的物体,转移到指尖上的动作。
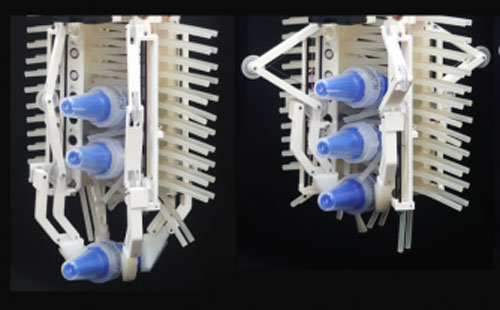
研究组为了体现这样的动作,机械地分离了夹住物体的“手指”和储存物体的部分“手掌”。这是为了根据角色分别控制手指、手掌。手掌上安装了柔软的毛发排列的传送带,可以稳定地储存多个大小不一的物体。通过这一技术,开发出了手指上2个马达、手掌上1个马达等利用共3个马达就可以一次性移动4个以上物体的抓握器。与逐一移动物体的抓握器相比,减少了34%的工程时间和71%的移动距离。赵教授就研究成果表示:“这是首次将多个物体储存在手掌中并逐一移动的人的动作应用于机器人的事例,将自然的核心原理配对机器人进行重组是机器人工程师的职责。”
东亚科学=李彩林记者 rini113@donga.com





