
국내 연구진이 여러 개의 물체를 손바닥에 담은 뒤 손바닥에서 하나씩 꺼내 원하는 위치에 놓을 수 있는 혁신적인 로봇을 개발했다. 물류 공장에 적용해 생산율을 대폭 높일 수 있을 것으로 기대된다.
조규진 서울대 기계공학과 교수 팀은 여러 물체를 한 번에 옮기고 정렬할 수 있는 혁신적인 ‘다물체 파지 그리퍼(MOGrip)’를 개발하고 11일(현지 시간) 국제학술지 ‘사이언스 로보틱스’에 발표했다. 그리퍼는 물건을 움켜쥘 수 있는 로봇손을 가리킨다. 논문 1저자는 엄재민 서울대 박사과정생이다. 지금까지 개발된 대다수의 그리퍼는 물체를 하나씩 잡아 옮기는 방식으로 작동했다. 여러 물체를 순서에 상관없이 한 번에 쓸어담거나 그리퍼 끝에 여러 개의 작은 그리퍼를 설치하는 방식의 그리퍼는 있었지만 순서대로 다시 물체를 배열하지는 못했다. 또 일정한 모양으로 배열되지 않으면 물체를 잡을 수 없는 한계도 있었다.
연구팀은 사람이 여러 물체를 옮기는 방식에 착안해 그리퍼를 개발했다. 사람은 한 번에 여러 물체를 잡아 손바닥에 담아놓은 뒤에 원하는 위치에 옮길 수 있다. 이때 물체를 손가락으로 집어 손바닥에 옮기고 다시 손가락으로 손바닥에 있는 물체를 집어 손가락 끝으로 옮기는 동작이 필요하다.
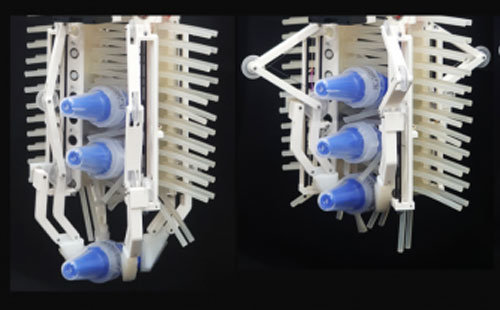
연구팀은 이 같은 동작을 구현하기 위해 물체를 집는 ‘손가락’과 물체를 저장하는 부분인 ‘손바닥’을 기계적으로 분리했다. 손가락, 손바닥을 역할에 맞게 각각 제어하기 위해서다. 손바닥에는 유연한 털이 배열된 벨트를 설치해 다양한 크기의 물체를 안정적으로 저장할 수 있게 설계했다. 이를 통해 손가락엔 2개의 모터, 손바닥엔 1개의 모터 등 총 3개의 모터만으로 4개 이상의 물체를 한 번에 옮길 수 있는 그리퍼를 개발했다. 물체를 하나씩 옮기는 그리퍼에 비해 공정 시간을 34%, 그리퍼의 이동 거리를 71% 줄였다. 조 교수는 연구 성과에 대해 “여러 물체를 손바닥에 저장해 하나씩 옮기는 사람의 동작을 로봇에 최초로 적용한 사례”라며 “자연의 핵심 원리를 로봇에 맞게 재구성하는 것이 로봇공학자의 역할”이라고 말했다.
이채린동아사이언스기자 rini113@donga.com





