
SNU team develops robot arms for pick-and-place tasks
SNU team develops robot arms for pick-and-place tasks
Posted December. 16, 2024 07:52,
Updated December. 16, 2024 07:52
A South Korean research team successfully developed a groundbreaking robot system that puts things on the palm part and places them where they want. If applied technologically to logistics facilities, the system will greatly increase productivity.
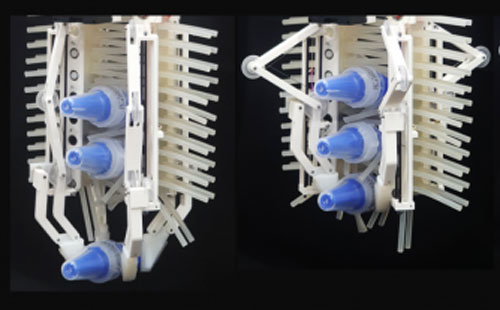
A research team led by Professor Cho Kyu-jin of mechanical and aerospace engineering at Seoul National University (SNU) released MOGrip, an innovative gripper for picking and placing multiple objects in the journal Science Robotics last Wednesday (local time). A gripper refers to a robot arm technology that grasps objects. The first author of this thesis is Eom Jae-min, who is currently in the doctoral program at SNU. Most grippers developed earlier only pick and move things one by one. Although some indiscriminately scoop up multiple objects at once and others have smaller-sized grippers placed at the tip, they cannot arrange things back in order or grasp things unless they are neatly organized.
The research team was inspired by how humans move multiple objects simultaneously. Humans can pick multiple things, put them on their palms, and place them anywhere they want. This is where their fingers work as they lift up things, place them on their palms, and move them with their fingertips.
To mimic how humans achieve these pick-and-place tasks, the researchers mechanically separated fingers that grasp things and palms that store them so that these two parts can be controlled according to their roles. The conveyor's palm consists of belts with elastic hairs to store things of various sizes in a stable way.
이채린동아사이언스기자 rini113@donga.com





