
韓国国内の研究チームが、複数の物体を手のひらに入れた後、手のひらから一つずつ取り出して希望する位置に置く革新的なロボットを開発した。物流工場に採用して生産率を大幅に高めることができるものと期待される。
ソウル大学機械工学科のチョ・ギュジン教授チームは、複数の物体を一度に移して整列できる革新的な「多物体ファージグリッパー(MOGrip)」を開発し、11日(現地時間)、国際学術誌「サイエンスロボティクス」に発表した。グリッパーとは、物をつかむことができるロボットの手を指す。論文1の著者は、ソウル大学博士課程に在籍しているオム・ジェミン氏だ。これまで開発された多くのグリッパーは、物体を一つずつつかんで運ぶ方法で作動した。複数の物体を順番に関係なく一度にかき集めたり、グリッパーの端に複数の小さなグリッパーを設置するグリッパーはあったが、順番に再び物体を配列することはできなかった。また、一定の形で配列されなければ、物体をつかむことができないという限界もあった。
研究チームは、人間が複数の物体を移す方法に着目し、グリッパーを開発した。人間は一度に、複数の物体を捕まえて手のひらに入れておいた後、好きな位置に移すことができる。この時、物体を指で拾って手のひらに移し、再び指で手のひらにある物体を拾って指先で移す動作が必要だ。
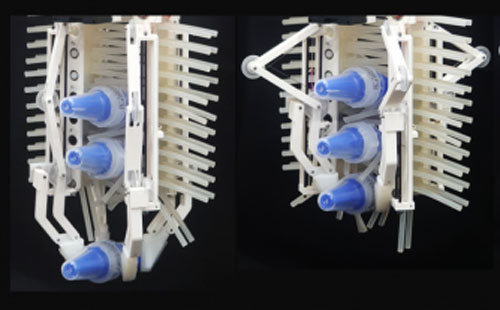
研究チームは、このような動作を具現するために、物体を取る「指」と物体を貯蔵する部分である「手のひら」を機械的に分離した。指や手のひらを、役割に合わせてそれぞれ制御するためだ。手のひらには、柔軟な毛が配列されたベルトを設置し、様々な大きさの物体を安定的に貯蔵できるように設計した。これを通じて、指には2つのモーター、手のひらには1つのモーターの計3つのモーターのみで、4つ以上の物体を一度に運べるグリッパーを開発した。物体を一つずつ移すグリッパーに比べて工程時間を34%、グリッパーの移動距離を71%減らした。チョ教授は、研究成果について、「色々な物体を手のひらに貯蔵して一つずつ移す人の動作を、ロボットに初めて適用した事例だ」とし、「自然の主要原理をロボットに合うように再構成することが、ロボット工学者の役割だ」と話した。
イ・チェリン東亜サイエンス記者 rini113@donga.com





