일본 스타트업 ‘아이스페이스’
민간기업 최초로 달 착륙 시도, 초소형 로버 ‘라시드’ 함께 실려
표면 굴러다니며 살피는 탐사로봇
태양에너지 등 동력원으로 사용해 향후 화성 탐사에도 적용될 예정
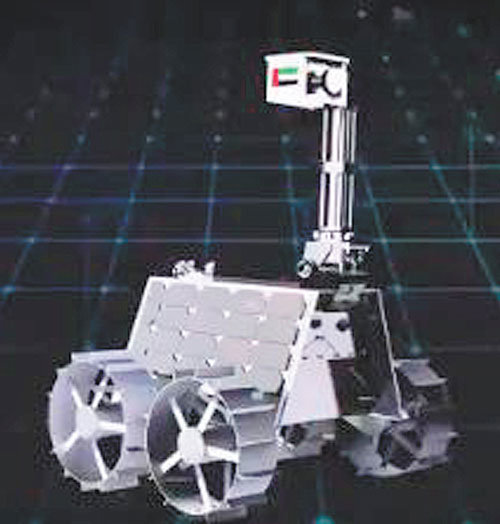
일본 우주개발 스타트업 ‘아이스페이스’가 11일(현지 시간) 달에 착륙선을 쏘아 올렸다. 착륙선에는 아랍에미리트(UAE)가 개발한 10kg 무게의 초소형 로버(탐사로봇) ‘라시드’가 실려 있다. 예정대로 내년 4월 말 달 착륙에 성공하면 민간 기업의 최초 달 착륙이라는 새로운 기록을 세우는 것은 물론이고 아랍 국가 최초이자 러시아와 미국, 유럽, 중국에 이어 세계에서 5번째로 달에 로버를 보내는 국가에 UAE가 이름을 올리게 된다.
막대한 비용이 드는 우주개발에서 정부가 아닌 민간기업이 달 착륙선을 발사하는 시대가 열리며 착륙선에 실리는 로버도 점점 늘어날 것으로 전망된다. 전문가들은 달 표면에 수십 대의 로버가 돌아다니는 미래가 머지않아 펼쳐질 것으로 보고 있다.
○ 사람보다 먼저 탐사에 나서는 로버… ‘라시드’는 달 표면 온도 관측
로버는 바퀴로 행성 표면 위를 굴러다니며 탐사 미션을 수행하는 일종의 차량이다. 태양에너지나 원자력을 동력원으로 사용한다. 특정 지역에 자리를 잡고 임무를 수행하는 착륙선과 달리 여러 지형을 자유롭게 돌아다니며 탐사하거나 우주개발이나 과학 실험 수행 등의 역할도 맡는다. 사람보다 먼저 달이나 행성을 살펴보는 선구자 역할을 하는 셈이다.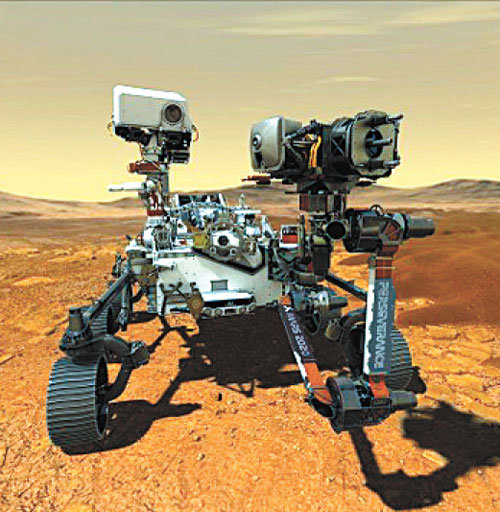
이번에 발사된 라시드의 임무는 달 표면의 온도를 측정하는 것이다. 달 지형을 분석하고 달 먼지의 크기와 구성 성분을 현미경 관찰 수준으로 연구한다. 영하 173도까지 기온이 떨어지는 달의 밤을 견디기 위한 기술 검증도 진행한다. 이 기술은 향후 화성 탐사에도 적용될 것으로 예상된다.
○ 형태와 성능 바꾸며 진화한 로버들 전성시대
우주 로버들을 보내면서 축적된 기술력과 노하우, 성과를 발판으로 향후 3년 내에 약 12대의 차세대 로버가 우주로 향한다. 차세대 로버들은 역할과 형태를 다양화하며 진화했다.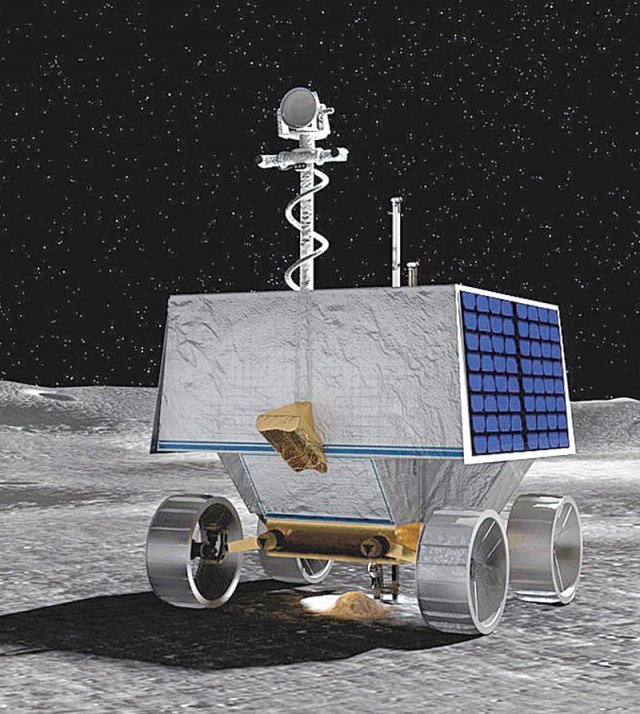
멕시코는 벌집 형태의 로버를 개발했다. 기존 자동차 형태의 로버에서 벗어난 것이다. 벌집 구멍 하나하나에는 무게 60g의 로봇 벌들이 들어 있다. 이 로봇 벌들은 군집을 이루며 달 표면 위의 입자와 자기 변동을 측정한다. 멕시코 최초의 우주 탐사 임무로 내년 상반기 안에 발사한다는 계획이다.
2025년까지 확정된 세계 각국의 달 탐사 계획은 20여 개에 이른다. 화성 탐사 등 현재 제안된 탐사 계획을 포함하면 인류의 우주 탐사 계획은 이보다 더 많을 것으로 보인다. 로버는 이 같은 우주 탐사 계획에서 핵심 역할을 수행한다. 로버 연구자인 김순겸 한국과학기술연구원(KIST) 선임연구원은 “사람이 할 모든 일을 로버가 대신하는 것”이라며 “사람 1명을 우주로 보내는 비용으로 여러 대의 로버를 보낼 수 있어 비용 대비 이득이 크다”고 말했다.
국내에서는 정부출연연구기관이 함께 손을 잡았다. 한국항공우주연구원과 한국원자력연구원, 한국천문연구원 등 5개 출연연은 현대차기아 연구개발본부, 한국자동차연구원과 올해 7월 한국형 달 탐사 로버 개발 공동연구를 추진하기로 했다. 민간 기업으로는 현대로템과 무인탐사연구소 등이 개발 중이다. 무인탐사연구소는 폭 30cm의 작은 로버와 접이식 로버, 바퀴 2개로만 구동하는 로버를 연구하고 있다. 조남석 무인탐사연구소 대표는 “한국의 달 탐사에 기여할 수 있는 탐사 로버를 개발하는 게 목표”라고 말했다.
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0