
로봇 물고기의 이름은 ‘로피’(ROFI). 로봇 물고기를 뜻하는 영어(Robot Fish)에서 땄다. 현재 로피는 버전 1.3까지 개발된 상태다. 1.1과 1.2는 내부와 외부 구조를 시험하기 위한 모델(더미)이며 1.3이 수중 음향탐지기를 장착한 진정한 의미의 첫 로봇 물고기다.》
○ 국내 최초 로봇 물고기 개발 성공
그동안 세계적으로 로봇 물고기 연구는 미국과 일본이 주도해왔다.
미국은 수중 기뢰를 탐지하는 등 주로 군사적인 목적으로 사용하기 위해 미 해군이 막대한 예산을 지원하고 있다. 1995년 매사추세츠공대(MIT)가 개발한 ‘찰리 1’(Charlie I)이 최초의 로봇 물고기다.
일본의 경우 기업을 중심으로 수cm 크기의 교육용 장난감 물고기 로봇 개발이 활발하다.
김 교수는 “세계 로봇 물고기 연구에 한국이 처음으로 뛰어들었다는 점에 큰 의미가 있다”며 “로봇 물고기는 미래에 무인 잠수정을 대체할 강력한 후보로 꼽히고 있어 앞으로 개발 경쟁이 치열해질 것”이라고 말했다.
○ 철사로 근육 재현해 몸통 하나로 이어
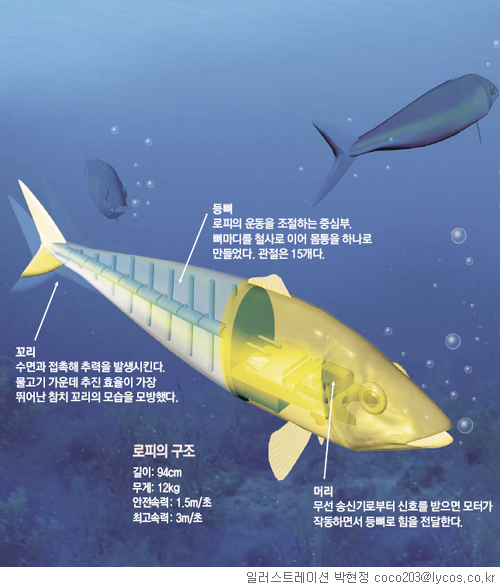
로피 1.3의 가장 큰 특징은 실제 물고기의 해부학적 구조를 그대로 모방해 몸통을 설계했다는 점이다. 지금까지 개발된 로봇 물고기는 대부분 몸통이 두세 부분으로 구분돼 있다. 꼬리의 움직임을 유연하게 만들기 위해서는 부위별로 동력원을 넣어야 했기 때문에 인위적으로 몸통을 나눈 것.
반면 로피는 진짜 물고기처럼 몸통을 하나로 이었다. 이를 위해 고안한 방법이 철사를 이용하는 것이었다. 각각의 뼈마디를 철사로 이은 다음 동력장치를 이용해 철사를 잡아당기면 몸통이 좌우로 움직인다.
이는 물고기가 헤엄칠 때 근육을 수축하고 이완하면서 관절을 움직이고 그 관절의 움직임을 이용해 몸통을 움직인다는 사실에 착안했다.
김 교수는 “부품이 2000여 개나 들어간 찰리 1과 비교해도 로피가 성능에서 전혀 뒤지지 않는다”고 평가했다.
○ 학부생이 로봇 물고기 개발 주역
로피 개발에는 학부생의 역할이 컸다.
곽상현(조선해양공학과 4년) 씨는 지난해 가을 학부 졸업논문 주제로 로봇 물고기를 선택했다가 로피까지 만들게 됐다. 곽 씨는 평소 손재주가 남달랐다. 곽 씨의 형은 국제기능올림픽대회에서 금메달을 수상한 경력이 있을 정도로 곽 씨의 손재주는 ‘집안 내력’이라는 평.
곽 씨와 함께 이희범(조선해양공학과 3년), 안양준(조선해양공학과 2년) 씨가 한 팀을 이뤄 로피 개발을 도왔다.
로피 2.0의 개념설계도 많이 진행된 상태다. 2.0은 1.3에 비해 기술적으로 한 단계 발전했다. 1.3은 아직 물 속에서 수평으로 헤엄치는 정도지만 2.0은 실제 물고기처럼 위아래로 헤엄칠 수 있는 기능이 추가될 것이다. 이를 위해 3차원 영역에서 신속히 제어가 가능한 항법 기술을 접목할 계획이다.
김 교수는 “안정적인 지원이 이뤄지면 10년 내에 군사용 대형 로봇 물고기와 나노기술을 활용한 교육용 소형 로봇 물고기를 모두 개발할 수 있을 것”이라고 밝혔다.
 |
이현경 동아사이언스 기자 uneasy75@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개


댓글 0