인간형 로봇 보행기술 궁금증 풀이
개발을 주도한 오준호 KAIST 휴머노이드로봇연구센터장은 대통령상인 대상을 받았다.▶본보 11월 30일자 A2면 참조 인간형 로봇 휴보2 ‘달리기’에 성공
인간형 로봇이 걷고 달리는 데 가장 중요한 기술은 무엇일까. 휴보2의 달리기 기능을 개발한 조백규 KAIST 연구원은 “개발자들은 발바닥과 균형 잡기에 가장 관심을 기울인다”고 설명했다.
○ 고무패드 붙여 걸음걸이 안정 성공
휴보가 안정적으로 걷는 비결은 발바닥에 붙어 있는 작은 고무패드다. 2001년 인간형 로봇 연구를 시작한 오 센터장 연구팀은 1년 만에 로봇 ‘KHR1’을 만들었다. 한국 최초의 걷는 로봇이었지만 걸음걸이가 안정적이지 못했다. 곧 휴보의 전신인 ‘KHR2’ 개발에 들어갔지만 로봇은 트레드밀(러닝머신)에서만 내려오면 몇 걸음 걷지 못하고 쓰러졌다. 당시 개발에 참여했던 김정엽, 박일우 연구원은 실험실에 엎드려 바닥 표면을 자세하게 살펴봤다. 결국 보기엔 평평해 보이는 바닥도 사실은 울퉁불퉁한 부분이 적지 않다는 점은 발견했다. 로봇의 민감한 발목 센서를 오히려 둔하게 만들 필요가 있었다. 김 연구원이 로봇 발바닥에 고무패드를 붙여보자는 아이디어를 냈고, 실험은 성공했다. 그 후 KAIST 휴머노이드로봇 연구센터에서 만드는 로봇에는 모두 고무패드가 붙어 있다.
걸음 옮길 때마다 균형센서 작동
日로봇, 관절 만들어 발가락 역할
美 몸체균형 방식… 韓-日과 달라
“속도 빠르고 인간걸음 가장 비슷”
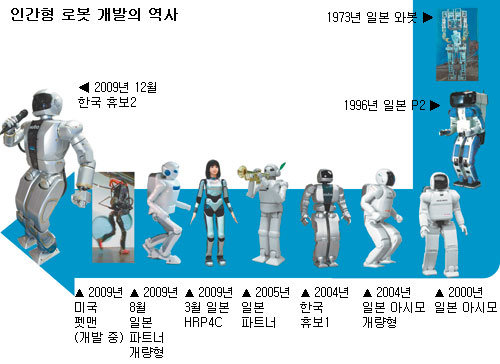
일본 도요타자동차의 로봇 ‘파트너’도 발바닥이 있지만 휴보와는 조금 다르다. 발 앞쪽에 관절을 만들어 인간의 발가락 역할을 하도록 했다. 그 결과 파트너는 지면을 밀면서 달릴 수 있어 두발 로봇 중 가장 빠른 시속 7km의 달리기 속도를 낸다. 아시모의 달리기 속도는 시속 6km로 조금 느리지만 방향전환을 하며 달릴 수 있다. 조 연구원은 “아시모는 평평한 발바닥을 기반으로 발목을 꺾는 인클리네이션(원심력에 맞춰 몸을 기울이는 동작)이 가능한 것 같다”고 분석했다. 휴보2의 최대 달리기 속도는 시속 3.6km다.
○ 사람처럼 걷는 미국 로봇
오 센터장은 “인간형 로봇이 걷거나 달리게 됐지만 아직은 시작에 불과하다”면서 “발바닥형, 발끝형 로봇의 장점을 합칠 수 있다면 더욱 진보된 로봇을 만들 수 있을 것”이라고 말했다.
전승민 동아사이언스 기자 enhanced@donga.com
▶thescience.co.kr에 동영상
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개



댓글 0