이필승 교수팀 ‘순-역자극 장치’ 부착… 원하는 경로 따라 이동하게 만들어
화산 폭발·지진·홍수와 같은 재난 지역이나 참혹한 범죄 현장.
많은 연구자는 카메라를 부착한 손바닥 크기의 소형 비행체처럼 사람이 직접 들어가기 위험한 지역에 투입하기 위한 무인 소형 로봇 개발에 나서고 있다. 이와 함께 살아 있는 생명체를 훈련시켜 원하는 방향이나 지역으로 이동시킬 수 있도록 조종하는 연구도 진행 중이다.
대표적인 것이 2008년 미국에서 개발된 ‘사이보그 비틀’. 날개 근육에 전극을 삽입해, 특정 주파수의 전기를 흘리면 날개를 움직이는 원리를 이용했다. 그러나 생체 모방 로봇은 배터리 용량의 한계로 장시간 운용하기 어렵고, 사이보그 비틀과 같은 방식의 생명체 조종은 살아 있는 생물에 끊임없이 전기 자극을 줘야 한다는 점에서 윤리 문제가 꾸준히 지적됐다.
이필승 KAIST 해양시스템공학부 교수팀은 생물체의 자극과 반응을 유도해 생물체를 원격으로 유도하는 기술을 개발해 이달 17일 미국 국립공공도서관학회지(PLoS ONE)에 발표했다.
연구팀은 동물이 지닌 장애물 회피 특성과 가상현실 시스템을 활용했다. 생명체로는 청거북을 활용했는데 가시광선 영역의 다양한 색을 구별할 수 있고 검은색 물체에 대한 회피 특성이 있는 것으로 밝혀졌기 때문이다.
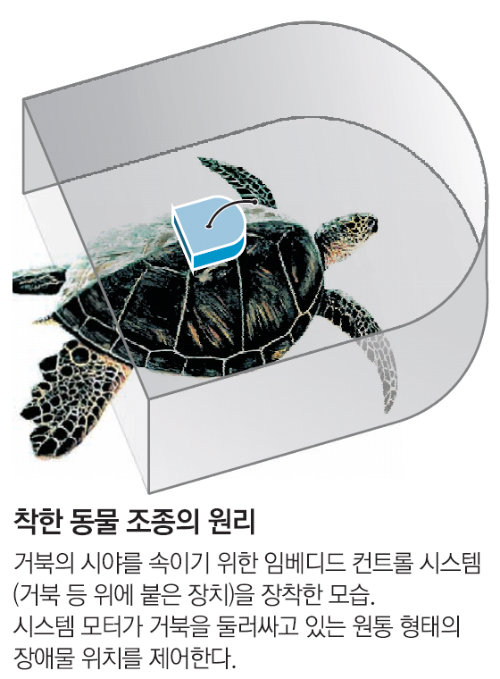
연구팀은 ‘순·역자극 장치’라는 반달 모양의 장치를 거북에게 부착해 원하는 특정 경로를 따라 이동하도록 조종하는 데 성공했다. 이 장치는 장애물이 없더라도 장애물이 있는 것처럼 가상현실을 만들어 준다. 거북을 오른쪽으로 움직이게 하려면 왼쪽에 커다란 벽이 있는 것처럼 착각하도록 유도하는 것이다. 그 결과 곡선으로 이뤄진 경로를 따라 거북이 움직이도록 하는 데 성공했다.
김민수 동아사이언스 기자 minsa@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개



댓글 0