가상의 원전화재 상황서 8가지 임무 척척 수행

푸른색 로봇 한 대가 요란한 소리를 내며 콘크리트 블록 더미 위에 올라섰다. 조심스럽게 한 걸음씩 내딛는 모습이 험지를 걷는 사람과 다를 바 없어 보였다.
‘태양의 도시’ 미국 플로리다 주 마이애미에서 차로 한 시간 정도 달리면 조그만 도시 홈스테드가 나온다. 이곳에 있는 자동차 경기장 ‘홈스테드-마이애미 스피드웨이’에서 이달 20, 21일 ‘DARPA 로보틱스 챌린지(DRC)’ 1차 결선 대회가 열렸다.
○ 로봇공학 한계를 실험한다
KAIST는 이 대회에 재난구조 로봇 ‘DRC휴보’를 들고 나왔다. 대회 둘째 날인 21일에는 가장 어렵다는 자동차 종목 테스트가 있었다.
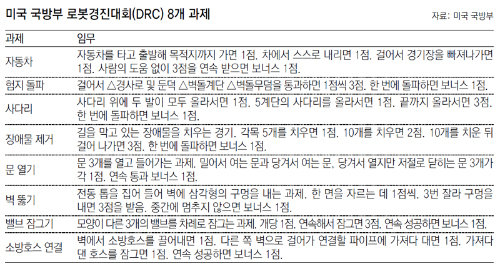
김지철 KAIST 연구원은 “카메라로 앞을 보며 조심해서 운전하는 것은 어느 정도 가능하지만, 로봇이 자기 발로 자동차에서 내려서는 기술을 가진 곳은 없다”고 말했다.
그렇지만 DRC휴보는 발목센서 고장으로 문 열기, 장애물 제거, 벽 뚫기 3개 종목에서 0점을 받고 총점 8점에 그쳤다. 한국기업 로보티즈가 개발한 ‘토르 OP’, 일명 똘망을 갖고 참가한 미국 버지니아공대 팀은 문 열기, 소방호스 연결, 밸브 잠그기 등에서 부분점수를 받아 총점 8점으로 KAIST 팀과 동점을 받았다.
○ 로봇 강국 한-미-일 각축의 장
재난구조로봇은 대부분 인간형이다. 사람 대신 일을 하려면 사람과 모습이 비슷해야 유리하기 때문이다. 이번 대회도 인간형 로봇을 만들 수 있는 우리나라와 일본, 미국이 참가했다.
일본의 샤프트팀은 6개 종목에서 만점을 받아 총점 32점 중 27점으로 이번 1차 결선대회에서 1위를 차지했다. 미국 플로리다인간기계인식연구소(IHMC) 팀은 인간형 로봇 ‘애틀러스’로 20점을 받아 2위에 올랐다. 애틀러스는 미국 기업 ‘보스턴다이내믹스’에서 만든 188cm의 대형 로봇이다.
마이애미=전승민 동아사이언스 기자 enhanced@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0