접히는 부위 형상기억 소재 부착… 사람 손 안대고 스스로 ‘3단 변신’
계단 나오면 바퀴 부풀려서 통과
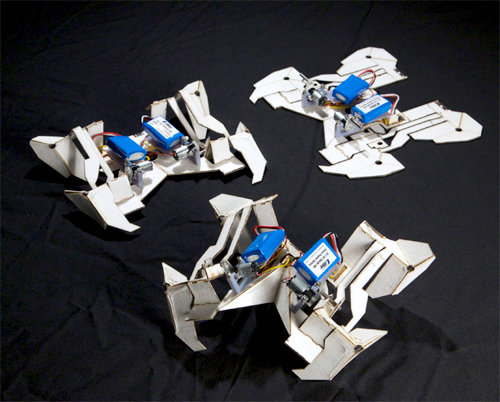
책상 위에 펼쳐진 종이 한 장. 잠시 후 종이가 꿈틀대기 시작하더니 네 다리를 만들고, 마치 고양이가 기지개를 펴듯 다리를 쭉 펴고 일어난다. 그리고 이번엔 몸통을 세우더니 다리까지 꼿꼿이 세운다. 사람 손 하나 안 대고 길이 10cm, 무게 78g의 초소형 로봇이 순식간에 탄생했다. 로봇의 3단 변신에 걸린 시간은 불과 4분 30초. 변신을 마친 로봇은 초속 5.4cm의 제법 빠른 속도로 기어갔다.
로버트 우드 미국 하버드대 교수팀은 과학 학술지 ‘사이언스’ 8일자에 이 로봇을 소개하며 “오리가미(折紙·종이접기)를 이용한 로봇”이라고 밝혔다. 색종이를 접어 배나 비행기를 만드는 것처럼 종이를 접어 로봇을 만들었다는 것이다.
우드 교수팀이 선택한 소재는 일종의 ‘전자종이’. 잘 휘어지는 얇은 플라스틱 기판에 종이를 덧댔다. 그리고 접히는 부위에는 형상기억 소재를 붙였다. 형상기억 소재가 접힌 자국을 기억하고 있다가 원 상태로 돌아가는 성질을 이용해 종이 스스로 몸을 접어 로봇이 만들어지도록 했다.
로봇의 종이접기 전개도를 그려주는 소프트웨어는 이미 출시돼 있다. 원하는 로봇의 형상을 지정하기만 하면 컴퓨터가 이 프로그램을 이용해 로봇의 전개도를 그려주고, 프린터에 로봇을 만들 소재를 넣고 전개도를 출력한 뒤 전개도대로 접어주기만 하면 로봇이 손쉽게 완성된다. 우드 교수는 “스스로 변신 가능한 로봇은 우주 공간이나 방사능 오염 지역처럼 인간이 접근하기 힘든 지역에서 유용할 것”이라고 말했다.
국내에서도 이 로봇 연구가 진행되고 있다. 조규진 서울대 기계항공공학부 교수는 최근 자동차 바퀴를 종이접기 방식으로 만든 ‘타이어 로봇’을 6월 홍콩에서 열린 ‘국제로봇자동화학회(ICRA)’에서 발표해 주목을 받았다. 타이어 로봇의 지름은 5.5cm이며 초속 30cm로 달릴 수 있다. 특히 타이어 로봇은 도로를 달리다가 계단을 만나면 바퀴를 부풀려 계단도 척척 통과한다. 조 교수는 바퀴 사이사이에 접어 뒀던 소재를 다시 펴지게 해 바퀴가 부풀도록 했다.
신선미 동아사이언스 기자 vamie@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개



댓글 0