
국내 연구팀이 1초 당 70㎝ 속력으로 벽을 오를 수 있는 사족보행 로봇을 개발했다. 현재까지 개발된 보행형 등반 로봇 중 가장 빠르다. 향후 선박, 다리, 송전탑 등 대형 구조물을 점검하거나 수리하는데 쓰일 것으로 보인다.
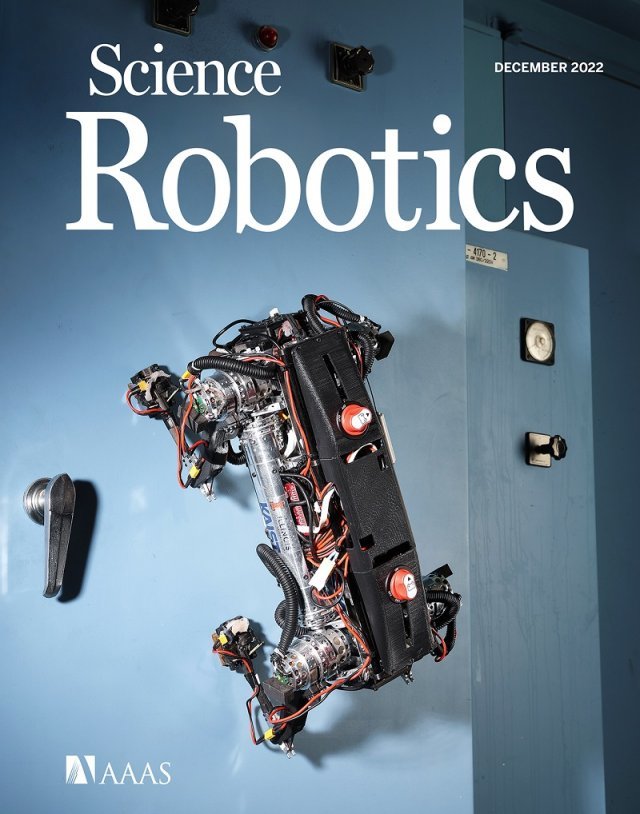
KAIST는 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족보행 로봇을 개발했다고 26일 밝혔다. 8㎏가량의 무게가 나가는 로봇은 가파른 직벽을 탈 때는 초속 70㎝, 천장에 거구로 매달려 이동할 때는 초속 50㎝의 속력을 기록했다.
특히 페인트가 칠해졌거나 먼지, 녹 등으로 더러워진 물탱크 표면에서도 초당 35㎝의 속력을 기록해 실용 가능성을 증명했다. 바닥에서 벽, 벽에서 천장으로 전환이 가능하고 벽에 돌출된 높이 5㎝ 가량의 장애물도 어려움 없이 넘었다.
연구팀은 사각형 구조 배열의 영전자석을 통해 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮췄고 보다 빠른 전환도 가능하게 만들었다. 169g인 발바닥은 535N(뉴턴·54.5㎏)의 수직 흡착력, 445N(45.4㎏)의 마찰력을 제공해 사족보행 로봇에 충분한 흡착력을 제공했다.
이를 통해 기존 로봇들이 가진 단점을 해소했다. 기존 벽면 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 장애물 지형을 극복하기 위한 등반용 보행로봇은 이동속도가 느리거나 다양한 움직임을 수행할 수 없었다.
연구팀은 “사족보행 로봇을 선박, 다리, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이뤄진 대형 구조물의 점검, 수리, 보수 등의 작업에 활용해 추락, 질식 등 안전사고 예방에 기여할 것으로 기대한다”고 말했다.
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개

![[횡설수설/김승련]“국무위원들, 경제 고민 좀 하고 말하라”](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News/130787617.1.thumb.jpg)
![“혈액만 분석해서 난소암 조기 발견… 11종 암 동시 진단 실현할 것”[허진석의 톡톡 스타트업]](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News/130787600.1.thumb.jpg)
댓글 0