
치킨 튀기고 물건 배송…오는 11월 실외 이동로봇 인도 통행 허용
최근 로봇은 우리 생활 가까이서 사람의 수고를 덜어주는 방식으로 기능하고 있다. 일례로 이마트 연수점은 지난 5월 리뉴얼을 마치고, 미래형 대형마트로 변화를 선언했다. 핵심은 사람의 수고를 덜어주는 방식으로 로봇을 활용, 사람과 기술의 조화를 꾀하는 것이다.
이마트 연수점은 식품 판매 코너인 마트 델리에 새우와 치킨 등을 튀기는 용도의 ‘로봇팔’을 도입했다. 덕분에 고온의 기름이 튀어도 사람이 다칠 염려가 없으며, 일정한 시간과 온도로 음식을 튀겨 동일한 맛 또한 보장한다. 로봇팔이 튀긴 음식은 곧장 진열대로 향해 소비자에게 판매된다.

국회를 통과한 도로교통법 개정안에 따르면, 기존 차로 분류하던 실외 이동로봇이 보행자로 규정된다. 이에 따라 실외 이동로봇은 오는 11월부터 인도를 통행할 수 있게 됐다. 규제의 벽이 허물어지자, 관련 기업들의 합종연횡이 활발하다.
실내외 자율주행 로봇을 개발하는 ‘뉴빌리티’는 세븐일레븐과 손잡고 서울 서초구 방배동 일대와 건국대학교 서울캠퍼스를 중심으로 오는 10월 말까지 로봇배달 서비스에 나선다. 지난해 방배동 소재 세븐일레븐 편의점에서 실증 사업을 펼친 뉴빌리티는 올해 방배 1동 전역과 방배 3·4동 일부 지역, 건국대 서울캠퍼스로 서비스 범위를 확대해 다가오는 로봇배달 시대를 준비하고 있다.
농작물 수확에도 로봇 활용 임박
음식을 조리하고 물건을 배달하는 데에서 나아가 농작물을 수확하는 데에도 로봇을 활용하는 방안이 적극 추진된다. 일손이 부족한 농가에 활기를 불어넣을 수 있을지 기대를 모은다.

한국기계연구원은 최태용 로봇메카트로닉스연구실 책임연구원팀이 자동으로 작물을 수확하는 로봇과 수확한 작물을 하역장으로 운반하는 이송 로봇을 개발했다고 밝혔다.

로봇 팔 상단의 카메라가 열매를 인식하면, AI가 열매의 위치와 숙성도를 판단해 수확 여부를 결정하는 방식이다. 수확한 열매가 일정 수준으로 쌓이면, 이송용 로봇이 쌓인 열매를 옮기는 기능도 구현했다.
기기 개발을 주도한 최태용 책임연구원은 “아직은 내구성과 신뢰성 검증이 추가로 필요하고 농가에 보급하려면 가격도 합리화해야 하는 과제가 있다”며 “열매가 익어도 일손이 부족해 따지 못하는 현상이 벌어지는 농가에서 큰 관심을 보이며 문의하고 있다”고 말했다.
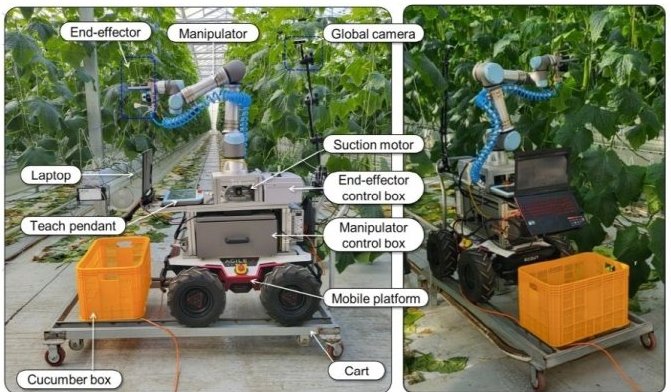
예컨대 작업자가 과채류를 수확할 때 수확하려는 작물의 순서를 정한 후 하나씩 차례대로 수확한다. 이때 수확하려는 작물이 흔들려도 눈으로 계속 주시하면서 한 손으로 작물을 잡고 다른 손으로 도구를 활용해 작물을 절단한다. 연구팀이 개발한 수확용 로봇은 이 같은 인간의 행동을 모방해 수확 과정을 ▲인식(Perception) ▲수확 순서 최적화(Harvesting Ordering) ▲영상 기반 추적제어(Visual Servoing) ▲그리퍼(Gripper)로 치환, 사람의 작물 수확을 보조한다.

연구팀은 로봇이 수확할 작물을 인식하는 과정에서 광량과 같은 주변 환경 변화에 영향받지 않도록 설계했으며, 로봇이 작물을 인식한 결과에 유전자 알고리즘을 적용, 수확 순서를 최적화했다. 이후 파지와 절단 모듈로 구성한 소프트 로봇 기반의 그리퍼로 수확 작물을 파지하고 절단한 뒤 다음 수확 순서의 작물에도 같은 과정을 수행하도록 했다.
손 교수팀은 수확용 인간중심 로봇을 다수 토마토와 오이를 재배하는 스마트팜 현장에서 실증한 결과, 높은 수확 성공률을 보였다고 밝혔다. 연구팀은 수확 속도와 성공률 등을 개선하기 위해 인간 작업자처럼 양팔을 사용하는 수확 로봇에 관한 후속 연구를 수행하고 있다고 덧붙였다.
업계 관계자는 “농가의 인력 부족을 개선하기 위해 다수 기술이 개발, 적용되고 있으나 보급 확대를 이뤄야 농가의 활로 개척에 실질적인 도움이 될 것”이라며 “관건은 얼마나 빨리 기술을 실제 수확 현장에 안전하게 적용할 수 있을지, 합리적인 가격대를 구성할 수 있을지에 달렸다고 본다”고 말했다.
동아닷컴 IT전문 김동진 기자 (kdj@itdonga.com)
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개

댓글 0