계단 오르내리고 서서 이동 가능한 ‘로봇 휠체어’ 세계 첫 개발
- 동아일보
-
입력 2023년 10월 5일 15시 55분
공유하기
글자크기 설정

국내 연구진이 계단을 오르내리고, 일어서서 생활하는 것을 돕는 ‘로봇 휠체어’ 기술을 세계 최초로 개발했다. 기존에도 계단을 오르는 휠체어와 일어서서 이동할 수 있는 휠체어가 각각 있었지만, 두 모듈을 하나의 휠체어에서 구현한 것은 세계 최초다.
과학기술정보통신부 산하 한국기계연구원은 5일 계단을 오르내리는 ‘계단 등반 모듈’, 일어서서 이동하고 탑승한 상태에서 눕고 기울이는 등 다양한 자세를 취할 수 있는 ‘스탠딩 모듈’을 구현한 로봇 휠체어 개발에 성공했다고 밝혔다.
또 휠체어에 탑승한 상태에서 다양한 자세로 변환할 수 있어 압력이 특정 부품에 집중되는 것을 해소했다. 로봇 자체 무게(자중)에 의해 발생하는 회전력을 최소화하는 ‘자중보상기술’을 적용해 눕고 앉고 서는 등 5가지 자세로 바꿀 수 있다.
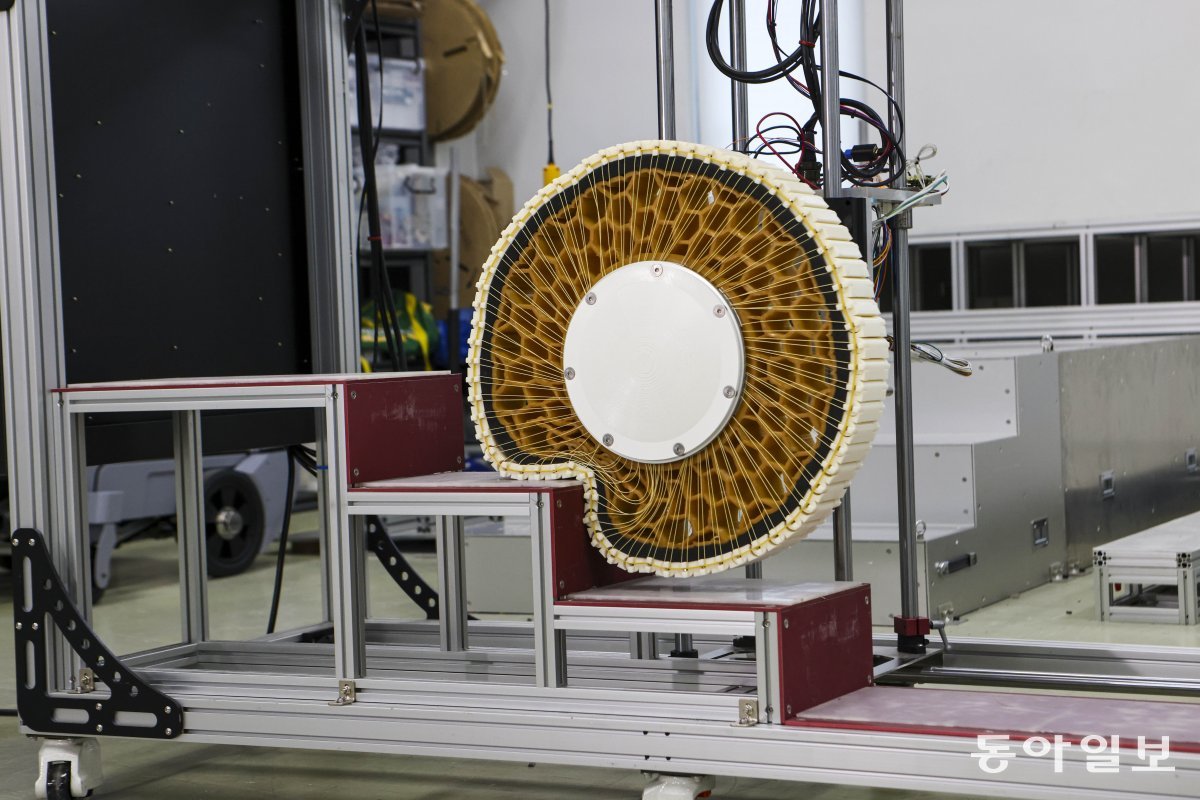
연구진은 나아가 특수 설계한 ‘변형 휠’ 원천기술도 개발했다. 변형 휠은 평지에서는 일반 바퀴처럼 원형을 유지하며 이동하지만 장애물을 만나면 바퀴가 유연해지면서 장애물 모습과 일치하도록 변한다. 즉 둥그런 모양이었던 바퀴가 계단을 만나면 계단과 비슷한 모양으로 바뀌게 된다. 박찬훈 기계연 AI로봇연구본부장은 “개발된 기술을 신속히 확산시켜 장애인 삶의 질을 높일 것”이라고 말했다.
© dongA.com All rights reserved. 무단 전재, 재배포 및 AI학습 이용 금지
트렌드뉴스
-
1
이정후 美공항서 일시 구금…前하원의장까지 나서 풀려났다
-
2
법원 “이진숙 방통위 KBS 이사 7명 임명 무효”
-
3
한동훈 제명 결정, 민주-국힘 지지층 모두 “잘했다” 더 많아
-
4
[단독]“권성동, ‘王’자 노리개 등 장식 상자 2개로 1억 받았다”
-
5
현대차 노조 “합의 없인 로봇 단 1대도 안돼”…‘아틀라스’에 위기감
-
6
[단독]年수출 처음 일본 제쳤다…韓 1041조원 vs 日 1021조원
-
7
李 “일부 교회, 설교때 이재명 죽여야 나라 산다고 해”
-
8
“주차딱지 덕지덕지 뭐냐”…제거비용 200만원 청구한다는 입주민
-
9
“179명 숨진 콘크리트 둔덕, 공항공사가 재활용 지시”
-
10
“트럼프, 1년간 14억달러 사재 축적… 사리사욕 채워”
-
1
수도권급 간-담도-췌장 수술 역량으로 지방 의료 살린다
-
2
박근혜 손잡고 울먹인 장동혁 “더 큰 싸움 위해 단식 중단”
-
3
현대차 노조 “합의 없인 로봇 단 1대도 안돼”…‘아틀라스’에 위기감
-
4
한동훈 제명 결정, 민주-국힘 지지층 모두 “잘했다” 더 많아
-
5
“장동혁 의식 혼미, 심정지 가능성”…단식 8일째 구급차 대기
-
6
장동혁 양지병원 입원…“단식 8일간 靑·여당 아무도 안왔다”
-
7
[사설]한덕수 구형보다 크게 무거운 23년형… 준엄한 ‘12·3’ 첫 단죄
-
8
[김순덕 칼럼]팥쥐 엄마 ‘원펜타스 장관’에게 700조 예산 맡길 수 있나
-
9
“주차딱지 덕지덕지 뭐냐”…제거비용 200만원 청구한다는 입주민
-
10
[단독]“이혜훈 아들, 연대 다자녀 전형 입학은 거짓말”
트렌드뉴스
-
1
이정후 美공항서 일시 구금…前하원의장까지 나서 풀려났다
-
2
법원 “이진숙 방통위 KBS 이사 7명 임명 무효”
-
3
한동훈 제명 결정, 민주-국힘 지지층 모두 “잘했다” 더 많아
-
4
[단독]“권성동, ‘王’자 노리개 등 장식 상자 2개로 1억 받았다”
-
5
현대차 노조 “합의 없인 로봇 단 1대도 안돼”…‘아틀라스’에 위기감
-
6
[단독]年수출 처음 일본 제쳤다…韓 1041조원 vs 日 1021조원
-
7
李 “일부 교회, 설교때 이재명 죽여야 나라 산다고 해”
-
8
“주차딱지 덕지덕지 뭐냐”…제거비용 200만원 청구한다는 입주민
-
9
“179명 숨진 콘크리트 둔덕, 공항공사가 재활용 지시”
-
10
“트럼프, 1년간 14억달러 사재 축적… 사리사욕 채워”
-
1
수도권급 간-담도-췌장 수술 역량으로 지방 의료 살린다
-
2
박근혜 손잡고 울먹인 장동혁 “더 큰 싸움 위해 단식 중단”
-
3
현대차 노조 “합의 없인 로봇 단 1대도 안돼”…‘아틀라스’에 위기감
-
4
한동훈 제명 결정, 민주-국힘 지지층 모두 “잘했다” 더 많아
-
5
“장동혁 의식 혼미, 심정지 가능성”…단식 8일째 구급차 대기
-
6
장동혁 양지병원 입원…“단식 8일간 靑·여당 아무도 안왔다”
-
7
[사설]한덕수 구형보다 크게 무거운 23년형… 준엄한 ‘12·3’ 첫 단죄
-
8
[김순덕 칼럼]팥쥐 엄마 ‘원펜타스 장관’에게 700조 예산 맡길 수 있나
-
9
“주차딱지 덕지덕지 뭐냐”…제거비용 200만원 청구한다는 입주민
-
10
[단독]“이혜훈 아들, 연대 다자녀 전형 입학은 거짓말”
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개

![아틀라스가 던진 미래 향한 ‘불편한’ 질문 [광화문에서/장윤정]](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News2/133214574.1.thumb.jpg)

댓글 0