중국, 무게 35g ‘홉콥터’ 개발
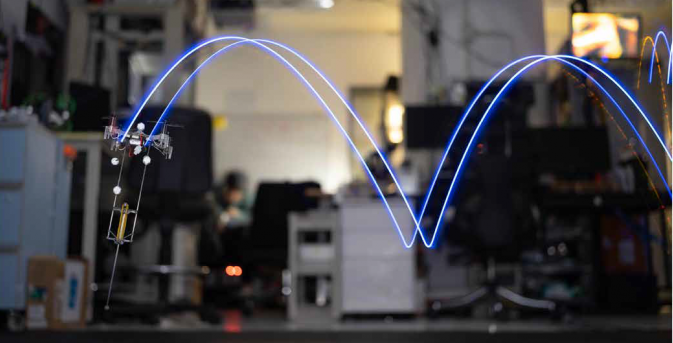
점프하는 호핑 로봇과 헬기 형태의 비행 로봇을 결합한 ‘홉콥터’가 개발됐다. 복잡한 환경에서 민첩하게 움직여 비행으로만 옮기기 어려운 물체를 운반하는 등 다용도로 활용될 것으로 기대된다.
빡퐁 치라라따나논 중국 홍콩시티대 의생명공학 및 기계공학과 교수팀이 하이브리드 호핑 및 비행 로봇인 홉콥터를 개발하고 연구 결과를 10일(현지 시간) 사이언스 로보틱스에 발표했다.
생물들 중에는 공중과 지상 이동을 융합해 움직이는 생물이 많다. 앵무새나 참새 같은 조류는 나뭇가지 사이를 뛰어넘으며 비행해 민첩하게 움직인다. 메뚜기나 벼룩 등 곤충도 환경을 탐색하고 포식자를 피하기 위해 점프와 비행을 함께 활용한다. 이동성과 효율성에서 이점이 있는 이들 생물의 움직임에서 영감을 받아 점프와 비행을 결합한 하이브리드 로봇 개발 시도가 있었지만 점프 높이를 자유자재로 변화시키고 연속으로 점프하는 움직임을 구현하기 쉽지 않았다.
연구팀은 “홉콥터는 순간적인 가속과 빠른 방향 전환이 가능해 복잡한 환경에서 민첩성과 활용성이 크다”며 “연속 비행으로 옮기기에는 너무 무거운 물체를 운반하는 데 활용할 수도 있을 것”이라고 기대했다.
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개
![“1초 스캔으로 잔반 줄이고 건강 지키는 마법”[허진석의 톡톡 스타트업]](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News/130486662.1.thumb.jpg)

![형제애로 마련한 400억…감사 전한 튀르키예[동행]](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News/130402416.1.thumb.jpg)
댓글 0