공유하기
물건 쥐고 순서대로 배열… ‘로봇손’ 한계 뛰어넘었다
- 동아일보
글자크기 설정
국내 연구진 개발 ‘파지 그리퍼’
물체 옮기고 정렬하는 동작 구현
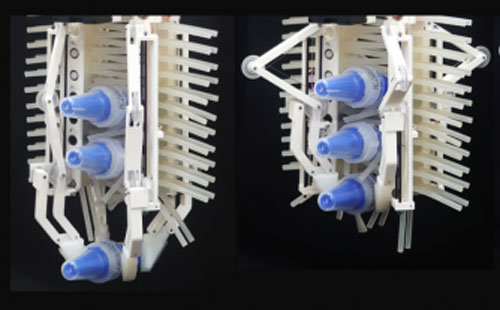
국내 연구진이 여러 개의 물체를 손바닥에 담은 뒤 손바닥에서 하나씩 꺼내 원하는 위치에 놓을 수 있는 혁신적인 로봇을 개발했다. 물류 공장에 적용해 생산율을 대폭 높일 수 있을 것으로 기대된다.
조규진 서울대 기계공학과 교수 팀은 여러 물체를 한 번에 옮기고 정렬할 수 있는 혁신적인 ‘다물체 파지 그리퍼(MOGrip)’를 개발하고 11일(현지 시간) 국제학술지 ‘사이언스 로보틱스’에 발표했다. 그리퍼는 물건을 움켜쥘 수 있는 로봇손을 가리킨다. 논문 1저자는 엄재민 서울대 박사과정생이다. 지금까지 개발된 대다수의 그리퍼는 물체를 하나씩 잡아 옮기는 방식으로 작동했다. 여러 물체를 순서에 상관없이 한 번에 쓸어담거나 그리퍼 끝에 여러 개의 작은 그리퍼를 설치하는 방식의 그리퍼는 있었지만 순서대로 다시 물체를 배열하지는 못했다. 또 일정한 모양으로 배열되지 않으면 물체를 잡을 수 없는 한계도 있었다.
연구팀은 사람이 여러 물체를 옮기는 방식에 착안해 그리퍼를 개발했다. 사람은 한 번에 여러 물체를 잡아 손바닥에 담아놓은 뒤에 원하는 위치에 옮길 수 있다. 이때 물체를 손가락으로 집어 손바닥에 옮기고 다시 손가락으로 손바닥에 있는 물체를 집어 손가락 끝으로 옮기는 동작이 필요하다.
© dongA.com All rights reserved. 무단 전재, 재배포 및 AI학습 이용 금지
트렌드뉴스
-
1
물로 씻어 먹는데…잔류 농약 많은 12가지 농산물은?
-
2
李 “악질 부동산 범죄 뿌리 뽑겠다”…1차 640명 송치 공개
-
3
모사드의 오판 [횡설수설/신광영]
-
4
카타르, 한국 등에 LNG 장기계약 불가항력 선언
-
5
“영어 못하는 애들”…전지현 시모, BTS 발언 논란에 “난 10년차 아미”
-
6
“전쟁중 이란에 21조원 안겨주나”…트럼프 석유판매 허용 ‘역풍’
-
7
[사설]재판소원 26건 모두 각하… ‘헌재의 절제’가 제도 성패의 관건
-
8
80m 상공 풍력발전기서 불, 비상탈출도 못했다
-
9
‘공습 유예’에도…미군 8000명, 이란 하르그섬 장악 나서나
-
10
[오늘과 내일/윤완준]‘뉴 이재명’은 언제든 사라질 수 있다
-
1
李 “어르신 무료 대중교통, 출퇴근 시간엔 제한 연구해보라”
-
2
김정은 “한국을 가장 적대적 국가로 공인…철저히 배척하고 무시”
-
3
韓, 유엔 北인권결의안 공동제안국 불참 검토
-
4
전두환 손자가 그린 ‘가족사 웹툰’ 6780만뷰…“놀랍고 얼떨떨”
-
5
李, 안철수 겨냥 “개구리 보호한다고 모기까지 보호하는 건 아냐”
-
6
이진숙 “컷오프 재심 청구…대구시장外 다른 선택지 고려안해”
-
7
李 “베이커리카페 10년하면 가업? 꼼수 감세”
-
8
李, 노인 무임승차 출퇴근 시간 제한 검토 지시에…박형준 “노인 짐짝 취급하나”
-
9
안철수 “李, 코스피 관련 공무원 주식투자도 막을건가”
-
10
李 “악질 부동산 범죄 뿌리 뽑겠다”…1차 640명 송치 공개
트렌드뉴스
-
1
물로 씻어 먹는데…잔류 농약 많은 12가지 농산물은?
-
2
李 “악질 부동산 범죄 뿌리 뽑겠다”…1차 640명 송치 공개
-
3
모사드의 오판 [횡설수설/신광영]
-
4
카타르, 한국 등에 LNG 장기계약 불가항력 선언
-
5
“영어 못하는 애들”…전지현 시모, BTS 발언 논란에 “난 10년차 아미”
-
6
“전쟁중 이란에 21조원 안겨주나”…트럼프 석유판매 허용 ‘역풍’
-
7
[사설]재판소원 26건 모두 각하… ‘헌재의 절제’가 제도 성패의 관건
-
8
80m 상공 풍력발전기서 불, 비상탈출도 못했다
-
9
‘공습 유예’에도…미군 8000명, 이란 하르그섬 장악 나서나
-
10
[오늘과 내일/윤완준]‘뉴 이재명’은 언제든 사라질 수 있다
-
1
李 “어르신 무료 대중교통, 출퇴근 시간엔 제한 연구해보라”
-
2
김정은 “한국을 가장 적대적 국가로 공인…철저히 배척하고 무시”
-
3
韓, 유엔 北인권결의안 공동제안국 불참 검토
-
4
전두환 손자가 그린 ‘가족사 웹툰’ 6780만뷰…“놀랍고 얼떨떨”
-
5
李, 안철수 겨냥 “개구리 보호한다고 모기까지 보호하는 건 아냐”
-
6
이진숙 “컷오프 재심 청구…대구시장外 다른 선택지 고려안해”
-
7
李 “베이커리카페 10년하면 가업? 꼼수 감세”
-
8
李, 노인 무임승차 출퇴근 시간 제한 검토 지시에…박형준 “노인 짐짝 취급하나”
-
9
안철수 “李, 코스피 관련 공무원 주식투자도 막을건가”
-
10
李 “악질 부동산 범죄 뿌리 뽑겠다”…1차 640명 송치 공개
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0