배지훈 생산기술원 연구원팀 개발
두 손으로 기계부품을 조립할 수 있는 산업용 로봇을 국내 연구진이 세계 최초로 개발했다. 팩인홀(기계부품 속에 다른 부품을 끼워 넣는 작업) 등 수작업이 필요한 정밀 조립작업을 자동화할 수 있게 돼 생산성이 높아질 것으로 기대된다.
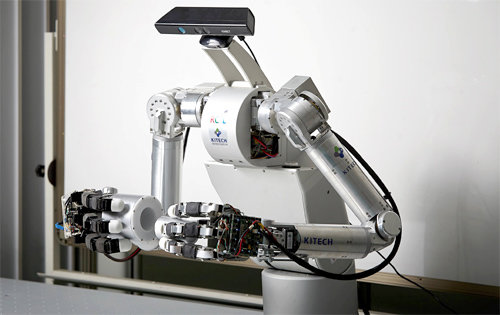
배지훈 한국생산기술연구원(생기원) 융합생산기술연구소 선임연구원팀은 3차원 인식정보를 이용해 물체를 조작하거나 조립할 수 있는 ‘양팔 로봇’ 개발에 성공했다고 30일 밝혔다. 양팔 로봇은 상반신만 있는 인간형(휴머노이드) 로봇으로 작업대에 올려 두고 사용하는 산업용 로봇이다. 머리 위에 있는 카메라 장치로 각종 부품을 인식하는 동시에 손끝 감각을 이용해 물건을 집어 올려 조립한다. 양손에 16개씩, 모두 50개의 관절이 있어 다양한 인체 동작을 흉내 낼 수 있다. 특히 오차 0.05mm 수준의 정밀한 조립작업이 가능하다. 이 로봇은 사람처럼 손끝에 전해져 오는 힘을 느끼고 이리저리 손을 움직여가며 부품을 정확하게 끼워 맞출 수 있다. 사람의 손처럼 생긴 기계손을 붙이고 있어 어떤 형태의 물건도 잡을 수 있다.
지금까지 공업용 로봇은 보통 집게 형태의 손을 갖고 있었다. 물건을 집어 드는 것이 아니라 집게 사이에 끼워 올리는 방식이었다. 새로운 작업을 하려면 거기 맞게 로봇도 새로운 것을 도입하거나 사람이 중간에 수작업을 해야 하는 단점이 있었다.
배 연구원은 “사람 손처럼 물건에 따라 손가락 모양을 바꿔가며 물건을 집어 들기 때문에 다양한 산업현장에 적용할 수 있다”고 말했다.
안산=전승민 동아사이언스 기자 enhanced@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0