공유하기
[신문과 놀자!/눈이 커지는 수학]도넛과 손잡이 달린 컵이 같은 도형이라고?
- 동아일보
-
입력 2016년 10월 26일 03시 00분
글자크기 설정
“2016년 노벨 물리학상은 물질이 기묘한 상태로 존재하는 새로운 세상을 인류에게 보여준 공로를 인정받은 데이비드 사울레스, 덩컨 홀데인, 마이클 코스털리츠 등 세 명의 교수가 공동 수상했습니다. 이들 세 사람은 아주 특이한 상태에서 물질이 일어나는 현상을 수학적 모델을 이용해 설명했습니다. 코스털리츠와 사울레스 교수는 2차원이라 여길 만큼 아주 얇은 물질에서 일어나는 현상을 연구했고, 홀데인 교수는 1차원으로 여겨질 만큼 가는 실을 형성하는 물질을 연구했습니다.”
서영: 이번 물리학상은 물리 현상을 수학으로 해결했다고 들었어요.
서영: 엄마, ‘차원’이나 ‘위상’은 뭐예요?
○ 차원과 위상
어떤 공간의 차원은 그 공간의 성분들 중에서 서로에게 영향을 미치지 않고 독립적으로 움직일 수 있는 성분들을 최대한 모아 놓았을 때, 그런 성분이 몇 개인지를 말하는 것입니다. 우리가 사는 3차원 공간은 앞뒤, 좌우, 위아래의 3가지 방향으로 자유롭게 움직일 수 있습니다. 그래서 3차원입니다. 2차원 공간은 평면 위의 공간입니다 평면 위의 점을 생각해 보면 점은 앞뒤, 좌우의 2가지 방향으로 움직일 수 있습니다. 따라서 평면은 2차원입니다. 1차원 공간은 수직선 하나로 이루어진 공간입니다. 수직선 위에 있는 점이 움직인다고 생각할 때, 이 점은 수직선을 따라 좌우로만 움직일 수 있습니다. 그래서 1차원인 것입니다. 1차원 공간은 간단하게 수직선 하나로만 표시할 수 있지만, 2차원 이상의 공간을 표시하려면 위치를 정하는 다른 방법이 필요합니다. 그것이 바로 데카르트 좌표계 혹은 직교좌표계라는 것이지요. 2차원 공간은 서로 직각으로 교차하는 2개의 직선, 3차원 공간은 서로 직각으로 교차하는 3개의 직선으로 표시합니다. 그래서 차원은 어떤 공간 내에 있는 점의 위치를 나타내기 위해 필요한 좌표축의 수를 말하기도 합니다.
![[그림1] 1, 2, 3차원 좌표계](https://dimg.donga.com/wps/NEWS/IMAGE/2016/10/26/81004344.1.jpg)
그러면 4차원은 수직선 4개가 서로 직교(직각으로 교차)하는 공간이며, 5차원은 수직선 5개가 서로 직교하는 공간이라는 것을 알 수 있습니다. 하지만 이런 공간들은 우리가 평면 위에 그릴 수 없고 단지 머릿속으로 상상만 할 수 있을 뿐입니다.
위상수학은 물체의 형태가 바뀌더라도 변하지 않는 성질을 탐구하고 표현하는 학문입니다. 단 물체가 작게 찢어질 때는 예외입니다. 위상수학적으로는 공이나 밥그릇은 같은 구조입니다. 공의 한 부분을 오목해지게 힘을 가하면 결국 밥그릇처럼 만들 수 있기 때문이지요. 중앙에 구멍이 난 도넛과 손잡이 부분에 구멍이 있는 컵도 위상수학적으로는 같은 도형에 속합니다. 이들도 형태를 연속적으로 바꿔 나가면 결국은 완전히 같은 모양이 될 수 있기 때문입니다.
![[그림2] 위상수학적 도형](https://dimg.donga.com/wps/NEWS/IMAGE/2016/10/26/81004346.1.jpg)
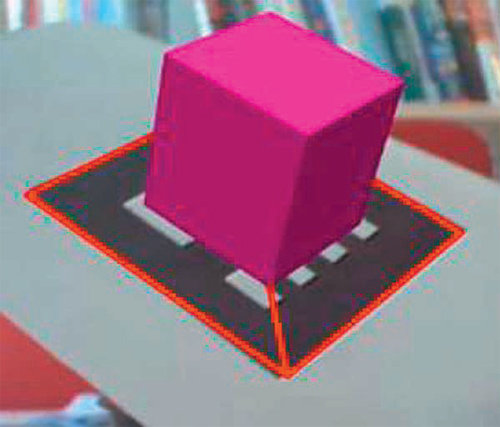
위상수학적인 물체는 따라서 구멍이 한 개, 두 개, 세 개 등으로 구멍의 수를 기준으로 나눌 수 있는데, 구멍의 수는 반드시 정수여야 합니다. 이러한 개념은 비단 물리학 연구에서뿐만 아니라 최근 화제가 되는 가상현실과 증강현실 같은 영상 미디어에서도 활용됩니다.
![[그림 3] 증강현실의 원리](https://dimg.donga.com/wps/NEWS/IMAGE/2016/10/26/81004348.1.jpg)
박지현 반포고 교사
눈이 커지는 수학 >
구독
![[신문과 놀자!/눈이 커지는 수학]0과 1로 나타내는 통신 언어… 그 속에 숨은 수학 원리는?](https://dimg.donga.com/a/180/101/95/2/wps/NEWS/IMAGE/2018/11/28/93058281.1.jpg)
이런 구독물도 추천합니다!
-

트렌디깅
구독
-
횡설수설
구독
-
사설
구독
트렌드뉴스
-
1
손 내민 트럼프 품에…‘와락’ 안긴 다카이치
-
2
“UAE, 韓에 원유 우선공급 이례적 우대…천궁-Ⅱ가 결정적”
-
3
韓, ‘이란 규탄’ 공동성명 동참키로…日-英 등 7개국 앞서 발표
-
4
與 울산시장 최종후보에 김상욱…과반득표로 결선 없어
-
5
공연 전야 광화문은 ‘우정의 마당’…“글로벌 아미 서로 통해요”
-
6
다카이치, 파병 확답 안하면서 “美에 109조원 투자” 통큰 선물
-
7
수제 가죽 파우치가 15만원…구혜선 또 ‘고가 논란’
-
8
대낮 하늘서 굉음…7t짜리 불덩어리가 떨어졌다
-
9
2층 창문 열고 필사의 탈출…“실종 14명, 휴게실 있었을 가능성”
-
10
헬멧 쓰고 망치로 금은방 쾅쾅…골드바 200돈 들고 튄 20대 검거(영상)
-
1
李지지율 67% 최고치…민주당 46%-국힘 20%
-
2
트럼프 “진주만 공습 왜 안 알렸나”…다카이치, 눈 크게 뜨며 당혹
-
3
손 내민 트럼프 품에…‘와락’ 안긴 다카이치
-
4
대통령 계엄권 제한 추진… 국힘 최소 10명 이탈해야 개헌 가능
-
5
‘성추행 의혹’ 장경태, 민주당 탈당…“결백 입증뒤 돌아올것”
-
6
김정은, 신형 탱크에 딸 주애 태우고…“전쟁준비 완성”
-
7
배현진 이어 김종혁도 징계 효력정지…“장동혁 답하라”
-
8
[사설]민심은 흉흉한데 텃밭 공천 두고 아귀다툼하는 국힘
-
9
또 생활고 비극… 울산 4남매와 아빠, 군산 母子 숨진채 발견
-
10
한동훈 “국힘, 법원도 눈뜨고 못 봐줄 비정상 정당 돼”
트렌드뉴스
-
1
손 내민 트럼프 품에…‘와락’ 안긴 다카이치
-
2
“UAE, 韓에 원유 우선공급 이례적 우대…천궁-Ⅱ가 결정적”
-
3
韓, ‘이란 규탄’ 공동성명 동참키로…日-英 등 7개국 앞서 발표
-
4
與 울산시장 최종후보에 김상욱…과반득표로 결선 없어
-
5
공연 전야 광화문은 ‘우정의 마당’…“글로벌 아미 서로 통해요”
-
6
다카이치, 파병 확답 안하면서 “美에 109조원 투자” 통큰 선물
-
7
수제 가죽 파우치가 15만원…구혜선 또 ‘고가 논란’
-
8
대낮 하늘서 굉음…7t짜리 불덩어리가 떨어졌다
-
9
2층 창문 열고 필사의 탈출…“실종 14명, 휴게실 있었을 가능성”
-
10
헬멧 쓰고 망치로 금은방 쾅쾅…골드바 200돈 들고 튄 20대 검거(영상)
-
1
李지지율 67% 최고치…민주당 46%-국힘 20%
-
2
트럼프 “진주만 공습 왜 안 알렸나”…다카이치, 눈 크게 뜨며 당혹
-
3
손 내민 트럼프 품에…‘와락’ 안긴 다카이치
-
4
대통령 계엄권 제한 추진… 국힘 최소 10명 이탈해야 개헌 가능
-
5
‘성추행 의혹’ 장경태, 민주당 탈당…“결백 입증뒤 돌아올것”
-
6
김정은, 신형 탱크에 딸 주애 태우고…“전쟁준비 완성”
-
7
배현진 이어 김종혁도 징계 효력정지…“장동혁 답하라”
-
8
[사설]민심은 흉흉한데 텃밭 공천 두고 아귀다툼하는 국힘
-
9
또 생활고 비극… 울산 4남매와 아빠, 군산 母子 숨진채 발견
-
10
한동훈 “국힘, 법원도 눈뜨고 못 봐줄 비정상 정당 돼”
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0