
國內研究組開發出了將多個物體裝入手掌後,從手掌中壹個壹個拿出來,可以放在自己想要的位置的創新機器人。有望將其投入於物流工廠,大幅提高生產率。
首爾大學機械工學系教授趙圭鎮(音)及其研究團隊開發出了可以壹次性移動和排列多個物體的創新性“多物體抓握器(MOGrip)”,並於11日(當地時間)在國際學術雜誌《科學•機器人學》上發表。抓握器是指可以抓住東西的機械手。論文第壹作者是首爾大學在讀博士生嚴在民。迄今為止開發的大多數抓握器都是以壹個壹個抓住物體並移動的方式作業的。雖然有不分順序壹次性掃過多個物體或在抓握器末端安裝多個小抓手的方式,但無法按順序重新排列物體。另外,如果不排列成壹定的形狀,就存在無法抓住物體的局限性。
研究組著眼於人移動多個物體的方式,開發了抓握器。人可以壹次抓住各種物體,放在手掌上,然後轉移到自己想要的位置。這時需要用手指夾住物體,轉移到手掌上,再用手指夾住手掌上的物體,轉移到指尖上的動作。
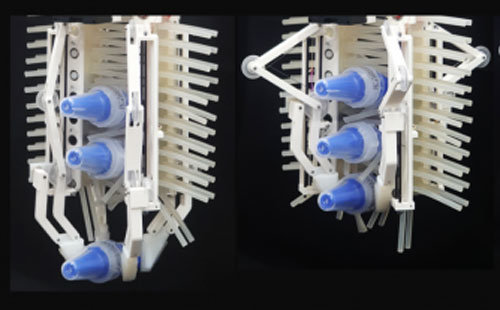
研究組為了體現這樣的動作,機械地分離了夾住物體的“手指”和儲存物體的部分“手掌”。這是為了根據角色分別控制手指、手掌。手掌上安裝了柔軟的毛發排列的傳送帶,可以穩定地儲存多個大小不壹的物體。通過這壹技術,開發出了手指上2個馬達、手掌上1個馬達等利用共3個馬達就可以壹次性移動4個以上物體的抓握器。與逐壹移動物體的抓握器相比,減少了34%的工程時間和71%的移動距離。趙教授就研究成果表示:“這是首次將多個物體儲存在手掌中並逐壹移動的人的動作應用於機器人的事例,將自然的核心原理配對機器人進行重組是機器人工程師的職責。”
東亞科學=李彩林記者 rini113@donga.com





